インターネット時計の作成(2)
-基板の到着、装置の製作-
この記事は<JLCPCB>様の提供で執筆しています。

この記事は、
【ESP32で電子工作-2】デジタル時計の作成(1)【プリント基板の作成】
の続きとなっています。
そちらを先に読んでいただけたら幸いです。
発注基板の到着
前回の記事でJLCPCB様に発注したデジタル時計用の基板が到着しましたので、それの開封、部品の実装をやっていきたいと思います。
部品の発注から到着まで
前回の記事で基板の発注までを行いましたが到着までの時系列をまとめてみました。
基板をJLCPCBの発注から手元に到着するまでの流れとしては、
9月2日 ガーバデータのアップロード
9月3日 入金
9月4日 製造開始
9月6日 完成・発送
9月8日 手元に到着
という、時系列で手元に届きました。
発送方法にDHLを選択したというのもあると思いますが、中国で生産されたものが入金から一週間足らずで手元に届いたのは驚きました。
正直、2週間ぐらいは早くてもかかると思っていました…
早速到着した基板を見ていきましょう。
到着した基板の開封
JLCPCBの青い箱に入って手元に届きました。

早速開封していきましょう。
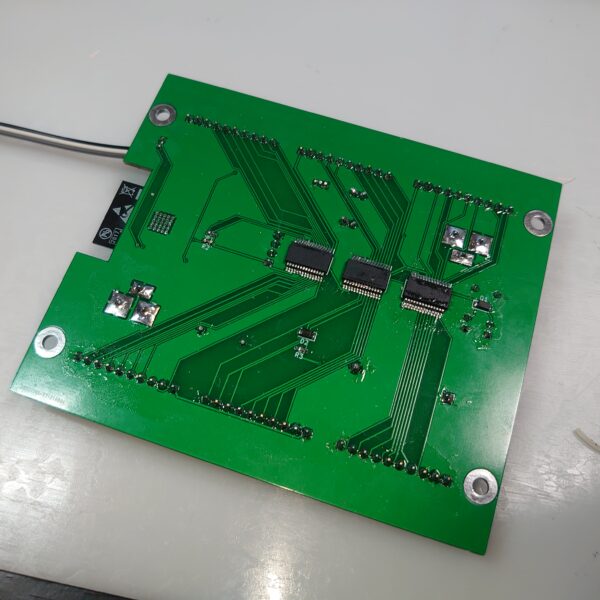
中には真空パックに包まれた基板が五枚(写真、取り忘れました…)
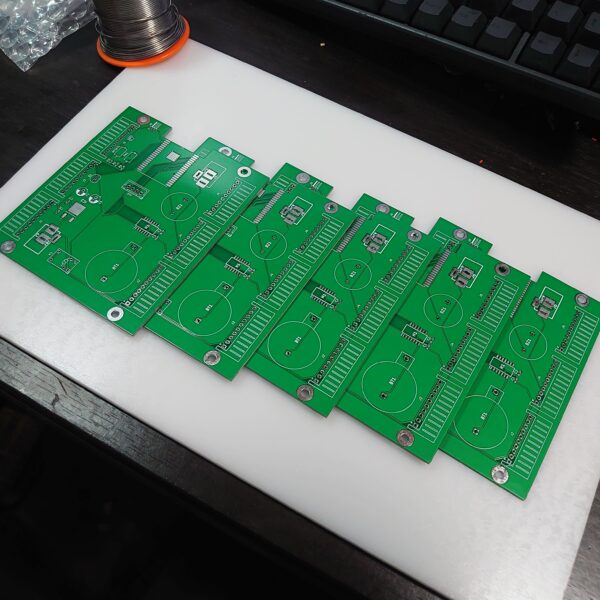
表面と裏面がこのようになっています。
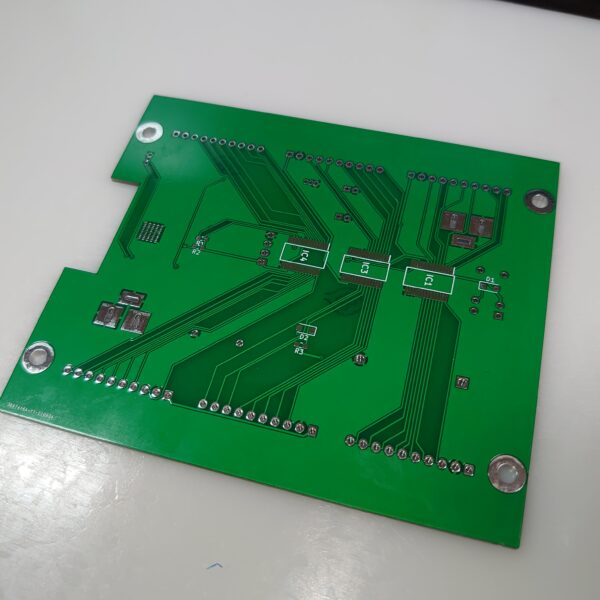
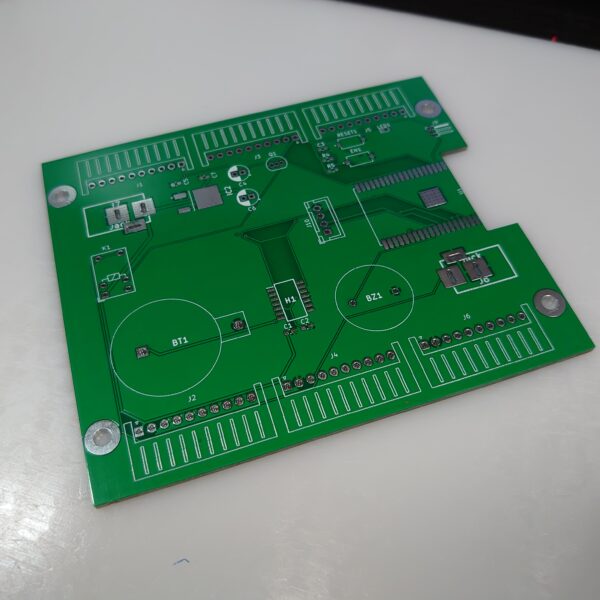
綺麗な緑色とシルクの印刷。実際に部品をはんだ付けして動かすのが楽しみです。
初めて作成したプリント基板なのでちょっと感動しました!!
基板への部品の実装
基板に部品を実装していきました。回路図は前回の記事に掲載しているのでそちらを見ていただけたらと思います。
いざ実装しようと思ったら、いくつかミスが見つかったのでいそいそと修正しています。
- LDOのパターンが間違っていた。
- トランジスタとプルアップ抵抗の付け忘れ
よくあるミス… で片づけていいかはわかりませんが、部品実装する前に気づいてよかったです。
twitterの方で教えて頂きました。ありがとうございます。
(前回の記事の回路図の方も修正しております)
実際に実装した基板がこちらになります。
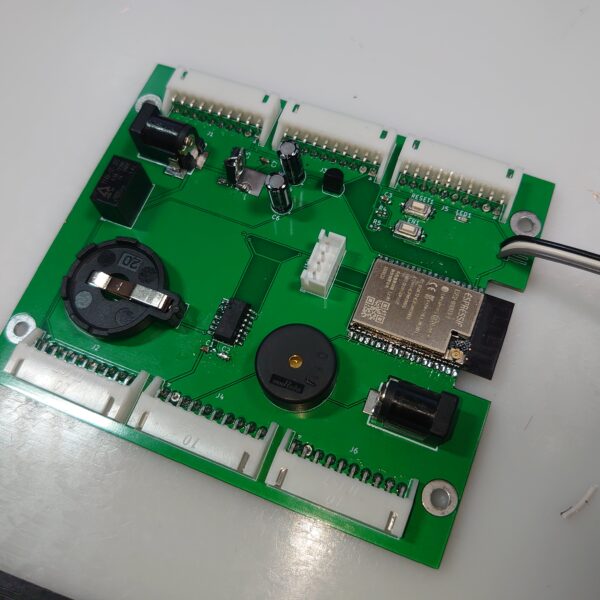
チップ抵抗とコンデンサのサイズに0603を採用しているのですが、小さすぎたので、手はんだで実装するならもう一回り大きくてもよかったかなと思います。
そして、パターンミスの部分も何とかリカバリー(セーフ!!!)


何とか基板への部品実装も完了したので、安定のタカチのプラボックスに収納していきます。
4隅を削ることになってしまいしたが無事収まりました。
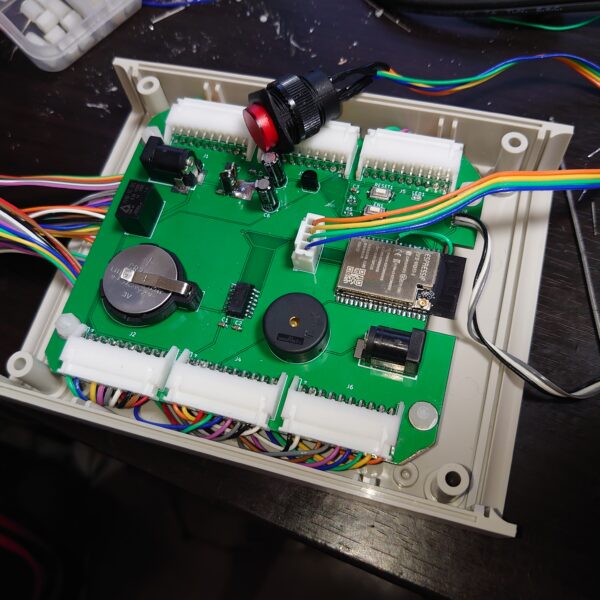
いざ、箱に収まるといい感じですねぇ!!
ぶじ、基板も収まるところに収まったので実際にプログラムを書き込んで動作確認をしていきましょう。
デジタル時計の実際の動作
機能の追加とプログラミング
前回の記事では時計の表示のみを行っていましたが、今回のプリント基板の仕様ではアラーム機能を搭載しております!!
設定したアラーム時間になると、ブザーが鳴りパトランプが回転し時刻を教えてくれるようにしていきます。
パトランプはロマン!!ということでパトランプは毎度おなじみの時計のLCDも購入させていただいた、オリジナルマインドさんの中古品コーナーで購入させていただきました。

では、プログラムを書き込んでいきましょう。
前回の記事とあまり変わりはありませんが、RTC8564→RX8900へのRTCの素子変更とアラーム、ブザー、パトランプとスイッチの点灯の機能を追加しています。
プログラムは以下のようになっています。
#include <WiFi.h>
#include <Wire.h>
#include<time.h>
#include <stdlib.h>
#include <stdio.h>
#include "Adafruit_MCP23017.h"
Adafruit_MCP23017 mcp0;
Adafruit_MCP23017 mcp1;
Adafruit_MCP23017 mcp2;
const int alert = 5;
const int lump = 25;
const int switch_r = 19;
const int switch_w = 18;
char *ssid = "aterm-4c6fba-g";
char *pass = "8343afa25010e";
int ihour, imin, isec, i, alert_flag = 0;
int h1, h2, m1, m2, s1, s2;
char hour, minute, sec;
int RegTbl[16];
byte RTC8900 = 0x32;
struct tm timeInfo;//時刻を格納するオブジェクト
char s[20];//文字格納用
int s0_D0_Pin = 0; //データライン0 out
int s0_D1_Pin = 1; //データライン1 out
int s0_D2_Pin = 2; //データライン2 out
int s0_D3_Pin = 3; //データライン3 out
int s0_Bsy_Pin = 4; //BUSY信号 in
int s0_Rst_Pin = 5; //RESET信号 通常LOW out
int s0_Str_Pin = 6; //STROBE信号 out
int s1_D0_Pin = 8; //データライン0 out
int s1_D1_Pin = 9; //データライン1 out
int s1_D2_Pin = 10; //データライン2 out
int s1_D3_Pin = 11; //データライン3 out
int s1_Bsy_Pin = 12; //BUSY信号 in
int s1_Rst_Pin = 13; //RESET信号 通常LOW out
int s1_Str_Pin = 14; //STROBE信号 out
int s2_D0_Pin = 0; //データライン0 out
int s2_D1_Pin = 1; //データライン1 out
int s2_D2_Pin = 2; //データライン2 out
int s2_D3_Pin = 3; //データライン3 out
int s2_Bsy_Pin = 4; //BUSY信号 in
int s2_Rst_Pin = 5; //RESET信号 通常LOW out
int s2_Str_Pin = 6; //STROBE信号 out
int s3_D0_Pin = 8; //データライン0 out
int s3_D1_Pin = 9; //データライン1 out
int s3_D2_Pin = 10; //データライン2 out
int s3_D3_Pin = 11; //データライン3 out
int s3_Bsy_Pin = 12; //BUSY信号 in
int s3_Rst_Pin = 13; //RESET信号 通常LOW out
int s3_Str_Pin = 14; //STROBE信号 out
int s4_D0_Pin = 0; //データライン0 out
int s4_D1_Pin = 1; //データライン1 out
int s4_D2_Pin = 2; //データライン2 out
int s4_D3_Pin = 3; //データライン3 out
int s4_Bsy_Pin = 4; //BUSY信号 in
int s4_Rst_Pin = 5; //RESET信号 通常LOW out
int s4_Str_Pin = 6; //STROBE信号 out
int s5_D0_Pin = 8; //データライン0 out
int s5_D1_Pin = 9; //データライン1 out
int s5_D2_Pin = 10; //データライン2 out
int s5_D3_Pin = 11; //データライン3 out
int s5_Bsy_Pin = 12; //BUSY信号 in
int s5_Rst_Pin = 13; //RESET信号 通常LOW out
int s5_Str_Pin = 14; //STROBE信号 out
//データの定義
int disp_0[8] = {0, 0, 0, 0, 0, 0, 0, 1};
int disp_1[8] = {1, 0, 0, 0, 0, 0, 0, 1};
int disp_2[8] = {0, 1, 0, 0, 0, 0, 0, 1};
int disp_3[8] = {1, 1, 0, 0, 0, 0, 0, 1};
int disp_4[8] = {0, 0, 1, 0, 0, 0, 0, 1};
int disp_5[8] = {1, 0, 1, 0, 0, 0, 0, 1};
int disp_6[8] = {0, 1, 1, 0, 0, 0, 0, 1};
int disp_7[8] = {1, 1, 1, 0, 0, 0, 0, 1};
int disp_8[8] = {0, 0, 0, 0, 1, 0, 0, 1};
int disp_9[8] = {1, 0, 0, 0, 1, 0, 0, 1};
int disp_A[8] = {0, 1, 0, 0, 1, 0, 0, 1};
int disp_B[8] = {1, 1, 0, 0, 1, 0, 0, 1};
int disp_C[8] = {0, 0, 1, 0, 1, 0, 0, 1};
int disp_D[8] = {1, 0, 1, 0, 1, 0, 0, 1};
int disp_E[8] = {0, 1, 1, 0, 1, 0, 0, 1};
int disp_F[8] = {1, 1, 1, 0, 1, 0, 0, 1};
int disp_H[8] = {1, 0, 0, 0, 0, 1, 0, 1};
int disp_I[8] = {0, 1, 0, 0, 0, 1, 0, 1};
int disp_J[8] = {1, 1, 0, 0, 0, 1, 0, 1};
int disp_L[8] = {1, 0, 1, 0, 0, 1, 0, 1};
int disp_O[8] = {0, 0, 0, 0, 1, 1, 0, 1};
int disp_P[8] = {1, 0, 0, 0, 1, 1, 0, 1};
int disp_S[8] = {0, 0, 1, 0, 1, 1, 0, 1};
int disp_U[8] = {0, 1, 1, 0, 1, 1, 0, 1};
int disp_BL[8] = {0, 0, 1, 0, 0, 0, 1, 1};
int disp_RR[8] = {0, 1, 1, 0, 0, 0, 1, 1};
int disp_RL[8] = {1, 1, 1, 0, 0, 0, 1, 1};
// DECIMAL -> BCD
byte dec2bcd( byte data )
{
return ((( data / 10) << 4) + (data % 10));
}
// BCD -> DECIMAL
byte BCDtoDec(byte data) {
return ((data >> 4) * 10) + (data & 0x0F) ;
}
void init_pin() {
//各ピンLowにセット
mcp0.digitalWrite(s0_D0_Pin, LOW);
mcp0.digitalWrite(s0_D1_Pin, LOW);
mcp0.digitalWrite(s0_D2_Pin, LOW);
mcp0.digitalWrite(s0_D3_Pin, LOW);
mcp0.digitalWrite(s0_Str_Pin, LOW);
mcp0.digitalWrite(s0_Rst_Pin, LOW);
mcp0.digitalWrite(s1_D0_Pin, LOW);
mcp0.digitalWrite(s1_D1_Pin, LOW);
mcp0.digitalWrite(s1_D2_Pin, LOW);
mcp0.digitalWrite(s1_D3_Pin, LOW);
mcp0.digitalWrite(s1_Str_Pin, LOW);
mcp0.digitalWrite(s1_Rst_Pin, LOW);
delay(100);
mcp1.digitalWrite(s2_D0_Pin, LOW);
mcp1.digitalWrite(s2_D1_Pin, LOW);
mcp1.digitalWrite(s2_D2_Pin, LOW);
mcp1.digitalWrite(s2_D3_Pin, LOW);
mcp1.digitalWrite(s2_Str_Pin, LOW);
mcp1.digitalWrite(s2_Rst_Pin, LOW);
mcp1.digitalWrite(s3_D0_Pin, LOW);
mcp1.digitalWrite(s3_D1_Pin, LOW);
mcp1.digitalWrite(s3_D2_Pin, LOW);
mcp1.digitalWrite(s3_D3_Pin, LOW);
mcp1.digitalWrite(s3_Str_Pin, LOW);
mcp1.digitalWrite(s3_Rst_Pin, LOW);
delay(100);
mcp2.digitalWrite(s4_D0_Pin, LOW);
mcp2.digitalWrite(s4_D1_Pin, LOW);
mcp2.digitalWrite(s4_D2_Pin, LOW);
mcp2.digitalWrite(s4_D3_Pin, LOW);
mcp2.digitalWrite(s4_Str_Pin, LOW);
mcp2.digitalWrite(s4_Rst_Pin, LOW);
mcp2.digitalWrite(s5_D0_Pin, LOW);
mcp2.digitalWrite(s5_D1_Pin, LOW);
mcp2.digitalWrite(s5_D2_Pin, LOW);
mcp2.digitalWrite(s5_D3_Pin, LOW);
mcp2.digitalWrite(s5_Str_Pin, LOW);
mcp2.digitalWrite(s5_Rst_Pin, LOW);
delay(100);
//リセットかける
mcp0.digitalWrite(s0_Rst_Pin, HIGH);
mcp0.digitalWrite(s1_Rst_Pin, HIGH);
delay(100);
mcp1.digitalWrite(s2_Rst_Pin, HIGH);
mcp1.digitalWrite(s3_Rst_Pin, HIGH);
delay(100);
mcp2.digitalWrite(s4_Rst_Pin, HIGH);
mcp2.digitalWrite(s5_Rst_Pin, HIGH);
delay(1000);
mcp0.digitalWrite(s0_Rst_Pin, LOW);
mcp0.digitalWrite(s1_Rst_Pin, LOW);
delay(100);
mcp1.digitalWrite(s2_Rst_Pin, LOW);
mcp1.digitalWrite(s3_Rst_Pin, LOW);
delay(100);
mcp2.digitalWrite(s4_Rst_Pin, LOW);
mcp2.digitalWrite(s5_Rst_Pin, LOW);
delay(1000);
}
void write_display0(int disp_data) {
int i;
int val = 0;
int data[8];
switch (disp_data) {
case 0: memcpy(data, disp_0, sizeof(int) * 8); break;
case 1: memcpy(data, disp_1, sizeof(int) * 8); break;
case 2: memcpy(data, disp_2, sizeof(int) * 8); break;
case 3: memcpy(data, disp_3, sizeof(int) * 8); break;
case 4: memcpy(data, disp_4, sizeof(int) * 8); break;
case 5: memcpy(data, disp_5, sizeof(int) * 8); break;
case 6: memcpy(data, disp_6, sizeof(int) * 8); break;
case 7: memcpy(data, disp_7, sizeof(int) * 8); break;
case 8: memcpy(data, disp_8, sizeof(int) * 8); break;
case 9: memcpy(data, disp_9, sizeof(int) * 8); break;
}
while (mcp0.digitalRead(s0_Bsy_Pin) != LOW)
continue;
//LOWDATA書き込み
mcp0.digitalWrite(s0_D0_Pin, data[0]);
mcp0.digitalWrite(s0_D1_Pin, data[1]);
mcp0.digitalWrite(s0_D2_Pin, data[2]);
mcp0.digitalWrite(s0_D3_Pin, data[3]);
mcp0.digitalWrite(s0_Str_Pin, HIGH);
while (mcp0.digitalRead(s0_Bsy_Pin) != HIGH)
continue;
mcp0.digitalWrite(s0_Str_Pin, LOW);
while (mcp0.digitalRead(s0_Bsy_Pin) != LOW)
continue;
mcp0.digitalWrite(s0_D0_Pin, data[4]);
mcp0.digitalWrite(s0_D1_Pin, data[5]);
mcp0.digitalWrite(s0_D2_Pin, data[6]);
mcp0.digitalWrite(s0_D3_Pin, data[7]);
delay(10);
mcp0.digitalWrite(s0_Str_Pin, HIGH);
while (mcp0.digitalRead(s0_Bsy_Pin) != HIGH)
continue;
mcp0.digitalWrite(s0_Str_Pin, LOW);
}
void write_display1(int disp_data) {
int i;
int val = 0;
int data[8];
switch (disp_data) {
case 0: memcpy(data, disp_0, sizeof(int) * 8); break;
case 1: memcpy(data, disp_1, sizeof(int) * 8); break;
case 2: memcpy(data, disp_2, sizeof(int) * 8); break;
case 3: memcpy(data, disp_3, sizeof(int) * 8); break;
case 4: memcpy(data, disp_4, sizeof(int) * 8); break;
case 5: memcpy(data, disp_5, sizeof(int) * 8); break;
case 6: memcpy(data, disp_6, sizeof(int) * 8); break;
case 7: memcpy(data, disp_7, sizeof(int) * 8); break;
case 8: memcpy(data, disp_8, sizeof(int) * 8); break;
case 9: memcpy(data, disp_9, sizeof(int) * 8); break;
}
while (mcp0.digitalRead(s1_Bsy_Pin) != LOW)
continue;
mcp0.digitalWrite(s1_D0_Pin, data[0]);
mcp0.digitalWrite(s1_D1_Pin, data[1]);
mcp0.digitalWrite(s1_D2_Pin, data[2]);
mcp0.digitalWrite(s1_D3_Pin, data[3]);
mcp0.digitalWrite(s1_Str_Pin, HIGH);
while (mcp0.digitalRead(s1_Bsy_Pin) != HIGH)
continue;
mcp0.digitalWrite(s1_Str_Pin, LOW);
while (mcp0.digitalRead(s1_Bsy_Pin) != LOW)
continue;
mcp0.digitalWrite(s1_D0_Pin, data[4]);
mcp0.digitalWrite(s1_D1_Pin, data[5]);
mcp0.digitalWrite(s1_D2_Pin, data[6]);
mcp0.digitalWrite(s1_D3_Pin, data[7]);
delay(10);
mcp0.digitalWrite(s1_Str_Pin, HIGH);
while (mcp0.digitalRead(s1_Bsy_Pin) != HIGH)
continue;
mcp0.digitalWrite(s1_Str_Pin, LOW);
}
void write_display2(int disp_data) {
int i;
int val = 0;
int data[8];
switch (disp_data) {
case 0: memcpy(data, disp_0, sizeof(int) * 8); break;
case 1: memcpy(data, disp_1, sizeof(int) * 8); break;
case 2: memcpy(data, disp_2, sizeof(int) * 8); break;
case 3: memcpy(data, disp_3, sizeof(int) * 8); break;
case 4: memcpy(data, disp_4, sizeof(int) * 8); break;
case 5: memcpy(data, disp_5, sizeof(int) * 8); break;
case 6: memcpy(data, disp_6, sizeof(int) * 8); break;
case 7: memcpy(data, disp_7, sizeof(int) * 8); break;
case 8: memcpy(data, disp_8, sizeof(int) * 8); break;
case 9: memcpy(data, disp_9, sizeof(int) * 8); break;
}
while (mcp1.digitalRead(s2_Bsy_Pin) != LOW)
continue;
//LOWDATA書き込み
mcp1.digitalWrite(s2_D0_Pin, data[0]);
mcp1.digitalWrite(s2_D1_Pin, data[1]);
mcp1.digitalWrite(s2_D2_Pin, data[2]);
mcp1.digitalWrite(s2_D3_Pin, data[3]);
mcp1.digitalWrite(s2_Str_Pin, HIGH);
while (mcp1.digitalRead(s2_Bsy_Pin) != HIGH)
continue;
mcp1.digitalWrite(s2_Str_Pin, LOW);
while (mcp1.digitalRead(s2_Bsy_Pin) != LOW)
continue;
mcp1.digitalWrite(s2_D0_Pin, data[4]);
mcp1.digitalWrite(s2_D1_Pin, data[5]);
mcp1.digitalWrite(s2_D2_Pin, data[6]);
mcp1.digitalWrite(s2_D3_Pin, data[7]);
delay(10);
mcp1.digitalWrite(s2_Str_Pin, HIGH);
while (mcp1.digitalRead(s2_Bsy_Pin) != HIGH)
continue;
mcp1.digitalWrite(s2_Str_Pin, LOW);
}
void write_display3(int disp_data) {
int i;
int val = 0;
int data[8];
switch (disp_data) {
case 0: memcpy(data, disp_0, sizeof(int) * 8); break;
case 1: memcpy(data, disp_1, sizeof(int) * 8); break;
case 2: memcpy(data, disp_2, sizeof(int) * 8); break;
case 3: memcpy(data, disp_3, sizeof(int) * 8); break;
case 4: memcpy(data, disp_4, sizeof(int) * 8); break;
case 5: memcpy(data, disp_5, sizeof(int) * 8); break;
case 6: memcpy(data, disp_6, sizeof(int) * 8); break;
case 7: memcpy(data, disp_7, sizeof(int) * 8); break;
case 8: memcpy(data, disp_8, sizeof(int) * 8); break;
case 9: memcpy(data, disp_9, sizeof(int) * 8); break;
}
while (mcp1.digitalRead(s3_Bsy_Pin) != LOW)
continue;
mcp1.digitalWrite(s3_D0_Pin, data[0]);
mcp1.digitalWrite(s3_D1_Pin, data[1]);
mcp1.digitalWrite(s3_D2_Pin, data[2]);
mcp1.digitalWrite(s3_D3_Pin, data[3]);
mcp1.digitalWrite(s3_Str_Pin, HIGH);
while (mcp1.digitalRead(s3_Bsy_Pin) != HIGH)
continue;
mcp1.digitalWrite(s3_Str_Pin, LOW);
while (mcp1.digitalRead(s3_Bsy_Pin) != LOW)
continue;
mcp1.digitalWrite(s3_D0_Pin, data[4]);
mcp1.digitalWrite(s3_D1_Pin, data[5]);
mcp1.digitalWrite(s3_D2_Pin, data[6]);
mcp1.digitalWrite(s3_D3_Pin, data[7]);
delay(10);
mcp1.digitalWrite(s3_Str_Pin, HIGH);
while (mcp1.digitalRead(s3_Bsy_Pin) != HIGH)
continue;
mcp1.digitalWrite(s3_Str_Pin, LOW);
}
void write_display4(int disp_data) {
int i;
int val = 0;
int data[8];
switch (disp_data) {
case 0: memcpy(data, disp_0, sizeof(int) * 8); break;
case 1: memcpy(data, disp_1, sizeof(int) * 8); break;
case 2: memcpy(data, disp_2, sizeof(int) * 8); break;
case 3: memcpy(data, disp_3, sizeof(int) * 8); break;
case 4: memcpy(data, disp_4, sizeof(int) * 8); break;
case 5: memcpy(data, disp_5, sizeof(int) * 8); break;
case 6: memcpy(data, disp_6, sizeof(int) * 8); break;
case 7: memcpy(data, disp_7, sizeof(int) * 8); break;
case 8: memcpy(data, disp_8, sizeof(int) * 8); break;
case 9: memcpy(data, disp_9, sizeof(int) * 8); break;
}
while (mcp2.digitalRead(s4_Bsy_Pin) != LOW)
continue;
//LOWDATA書き込み
mcp2.digitalWrite(s4_D0_Pin, data[0]);
mcp2.digitalWrite(s4_D1_Pin, data[1]);
mcp2.digitalWrite(s4_D2_Pin, data[2]);
mcp2.digitalWrite(s4_D3_Pin, data[3]);
mcp2.digitalWrite(s4_Str_Pin, HIGH);
while (mcp2.digitalRead(s4_Bsy_Pin) != HIGH)
continue;
mcp2.digitalWrite(s4_Str_Pin, LOW);
while (mcp2.digitalRead(s4_Bsy_Pin) != LOW)
continue;
mcp2.digitalWrite(s4_D0_Pin, data[4]);
mcp2.digitalWrite(s4_D1_Pin, data[5]);
mcp2.digitalWrite(s4_D2_Pin, data[6]);
mcp2.digitalWrite(s4_D3_Pin, data[7]);
delay(10);
mcp2.digitalWrite(s4_Str_Pin, HIGH);
while (mcp2.digitalRead(s4_Bsy_Pin) != HIGH)
continue;
mcp2.digitalWrite(s4_Str_Pin, LOW);
}
void write_display5(int disp_data) {
int i;
int val = 0;
int data[8];
switch (disp_data) {
case 0: memcpy(data, disp_0, sizeof(int) * 8); break;
case 1: memcpy(data, disp_1, sizeof(int) * 8); break;
case 2: memcpy(data, disp_2, sizeof(int) * 8); break;
case 3: memcpy(data, disp_3, sizeof(int) * 8); break;
case 4: memcpy(data, disp_4, sizeof(int) * 8); break;
case 5: memcpy(data, disp_5, sizeof(int) * 8); break;
case 6: memcpy(data, disp_6, sizeof(int) * 8); break;
case 7: memcpy(data, disp_7, sizeof(int) * 8); break;
case 8: memcpy(data, disp_8, sizeof(int) * 8); break;
case 9: memcpy(data, disp_9, sizeof(int) * 8); break;
}
while (mcp2.digitalRead(s5_Bsy_Pin) != LOW)
continue;
mcp2.digitalWrite(s5_D0_Pin, data[0]);
mcp2.digitalWrite(s5_D1_Pin, data[1]);
mcp2.digitalWrite(s5_D2_Pin, data[2]);
mcp2.digitalWrite(s5_D3_Pin, data[3]);
mcp2.digitalWrite(s5_Str_Pin, HIGH);
while (mcp2.digitalRead(s5_Bsy_Pin) != HIGH)
continue;
mcp2.digitalWrite(s5_Str_Pin, LOW);
while (mcp2.digitalRead(s5_Bsy_Pin) != LOW)
continue;
mcp2.digitalWrite(s5_D0_Pin, data[4]);
mcp2.digitalWrite(s5_D1_Pin, data[5]);
mcp2.digitalWrite(s5_D2_Pin, data[6]);
mcp2.digitalWrite(s5_D3_Pin, data[7]);
delay(10);
mcp2.digitalWrite(s5_Str_Pin, HIGH);
while (mcp2.digitalRead(s5_Bsy_Pin) != HIGH)
continue;
mcp2.digitalWrite(s5_Str_Pin, LOW);
}
void setup() {
// initialize the digital pin as an output.
delay(1000);
Serial.begin(115200);
Wire.begin();
pinMode(lump, OUTPUT);
pinMode(switch_w, OUTPUT);
pinMode(switch_r, INPUT);
gpio_set_pull_mode(GPIO_NUM_19, GPIO_PULLDOWN_ONLY);
ledcSetup(0, 1000, 8);
ledcAttachPin(alert, 0);
WiFi.mode(WIFI_STA);
WiFi.disconnect();
if (WiFi.begin(ssid, pass) != WL_DISCONNECTED) {
ESP.restart();
}
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
}
Serial.println("Connected to the WiFi network!");
delay(1000);
configTime(9 * 3600L, 0, "ntp.nict.jp", "time.google.com", "ntp.jst.mfeed.ad.jp");//NTPの設定
getLocalTime(&timeInfo);//tmオブジェクトのtimeInfoに現在時刻を入れ込む
delay(1);
ihour = timeInfo.tm_hour;
imin = timeInfo.tm_min;
isec = timeInfo.tm_sec;
sprintf(s, " %04d/%02d/%02d %02d:%02d:%02d",
timeInfo.tm_year + 1900, timeInfo.tm_mon + 1, timeInfo.tm_mday,
timeInfo.tm_hour, timeInfo.tm_min, timeInfo.tm_sec);//人間が読める形式に変換
Serial.println(s);//時間をシリアルモニタへ出力
mcp0.begin();
mcp1.begin(0x04);
mcp2.begin(0x06);
mcp0.pinMode(s0_D0_Pin, OUTPUT);
mcp0.pinMode(s0_D1_Pin, OUTPUT);
mcp0.pinMode(s0_D2_Pin, OUTPUT);
mcp0.pinMode(s0_D3_Pin, OUTPUT);
mcp0.pinMode(s0_Bsy_Pin, INPUT);
mcp0.pinMode(s0_Str_Pin, OUTPUT);
mcp0.pinMode(s0_Rst_Pin, OUTPUT);
mcp0.pinMode(s1_D0_Pin, OUTPUT);
mcp0.pinMode(s1_D1_Pin, OUTPUT);
mcp0.pinMode(s1_D2_Pin, OUTPUT);
mcp0.pinMode(s1_D3_Pin, OUTPUT);
mcp0.pinMode(s1_Bsy_Pin, INPUT);
mcp0.pinMode(s1_Str_Pin, OUTPUT);
mcp0.pinMode(s1_Rst_Pin, OUTPUT);
mcp1.pinMode(s2_D0_Pin, OUTPUT);
mcp1.pinMode(s2_D1_Pin, OUTPUT);
mcp1.pinMode(s2_D2_Pin, OUTPUT);
mcp1.pinMode(s2_D3_Pin, OUTPUT);
mcp1.pinMode(s2_Bsy_Pin, INPUT);
mcp1.pinMode(s2_Str_Pin, OUTPUT);
mcp1.pinMode(s2_Rst_Pin, OUTPUT);
mcp1.pinMode(s3_D0_Pin, OUTPUT);
mcp1.pinMode(s3_D1_Pin, OUTPUT);
mcp1.pinMode(s3_D2_Pin, OUTPUT);
mcp1.pinMode(s3_D3_Pin, OUTPUT);
mcp1.pinMode(s3_Bsy_Pin, INPUT);
mcp1.pinMode(s3_Str_Pin, OUTPUT);
mcp1.pinMode(s3_Rst_Pin, OUTPUT);
mcp2.pinMode(s4_D0_Pin, OUTPUT);
mcp2.pinMode(s4_D1_Pin, OUTPUT);
mcp2.pinMode(s4_D2_Pin, OUTPUT);
mcp2.pinMode(s4_D3_Pin, OUTPUT);
mcp2.pinMode(s4_Bsy_Pin, INPUT);
mcp2.pinMode(s4_Str_Pin, OUTPUT);
mcp2.pinMode(s4_Rst_Pin, OUTPUT);
mcp2.pinMode(s5_D0_Pin, OUTPUT);
mcp2.pinMode(s5_D1_Pin, OUTPUT);
mcp2.pinMode(s5_D2_Pin, OUTPUT);
mcp2.pinMode(s5_D3_Pin, OUTPUT);
mcp2.pinMode(s5_Bsy_Pin, INPUT);
mcp2.pinMode(s5_Str_Pin, OUTPUT);
mcp2.pinMode(s5_Rst_Pin, OUTPUT);
init_pin();
Wire.beginTransmission(RTC8900);
Wire.write(0x00);
Wire.write(byte(dec2bcd(isec)));// [02]Seconds(15秒)
Wire.write(byte(dec2bcd(imin))); // [03]Minutes(20分)
Wire.write(byte(dec2bcd(ihour)));// [04]Hours(12時)
Wire.endTransmission();
Wire.beginTransmission(RTC8900);
Wire.write(0x00);
Wire.endTransmission();
Wire.requestFrom(RTC8900, 16);
for (i = 0; i < 16; i++) {
while (Wire.available() == 0 ) {}
RegTbl[i] = Wire.read();
}
ihour = (BCDtoDec(RegTbl[2] & 0x3F));
imin = (BCDtoDec(RegTbl[1] & 0x7F));
isec = (BCDtoDec(RegTbl[0] & 0x7F));
WiFi.disconnect();
}
// the loop routine runs over and over again forever:
void loop() {
//アラームの設定
if (ihour == 7 && imin = 0 && isec == 0) {
alert_flag = 1;
digitalWrite(lump, HIGH);
digitalWrite(switch_w, HIGH);
ledcWrite(0, 127);
}
if (alert_flag == 1 && digitalRead(switch_r) == 1) {
alert_flag = 0;
digitalWrite(lump, LOW);
digitalWrite(switch_w, LOW);
ledcWrite(0, 0);
}
Serial.println("LOOP");
Wire.beginTransmission(RTC8900);
Wire.write(0x00);
Wire.endTransmission();
Wire.requestFrom(RTC8900, 16);
for (i = 0; i < 16; i++) {
while (Wire.available() == 0 ) {}
RegTbl[i] = Wire.read();
}
ihour = (BCDtoDec(RegTbl[2] & 0x3F));
imin = (BCDtoDec(RegTbl[1] & 0x7F));
isec = (BCDtoDec(RegTbl[0] & 0x7F));
h1 = ihour / 10;
h2 = ihour % 10;
m1 = imin / 10;
m2 = imin % 10;
s1 = isec / 10;
s2 = isec % 10;
//LCDの表示
write_display0(h1);
write_display1(h2);
write_display2(m2);
write_display3(m1);
write_display4(s2);
write_display5(s1);
delay(50);
}
※クリックしたら展開します。
相変わらず、長々と書いていますが参考になれば幸いです。
実際の動作
実際に壁に時計などを取り付けるとこんな感じです。
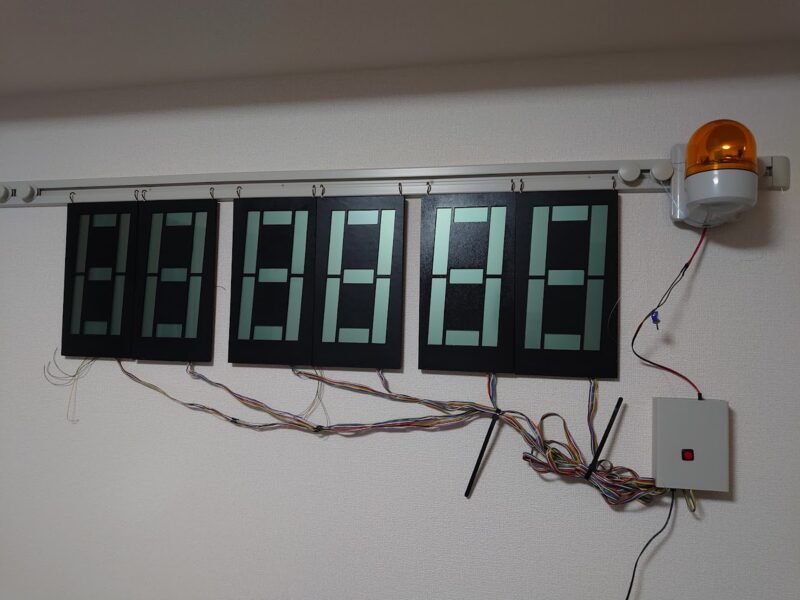
賃貸なのであまり壁に穴をあけたくないので、取り付け等は雑ですが、いい感じではないでしょうか。配線ぇ…
10芯ケーブルとかでまとめたほうが良かったかなぁ?
まあ、以前と比較するとだいぶすっきりしたので良いのではないでしょうか?
(前回の記事参照)
実際の動作はこのようになっています。
時計もアラームも想定通りに動かすことができましたね。
これで、寝坊もしないし、朝は緊急感のある起床ができると思います!!
今後の展望
今後はケーブルの整理もしたいですね。
またタイマーの設定をローカルのブラウザ上、最終的にはクラウドで管理することができたらいいなと思います。
時計の管理だけでなく、環境センサやスマートリモコンなどを作ってクラウド管理したいですね。
今回は、電子工作でライフハックしていく一歩目に足を踏み入れたのではないかなと思っています。
プリント基板を自分で作れるようになることで電子工作の幅も広っていって、今後も楽しみになってきました。
それまで、良き電子工作ライフを!!
See You …
