無線操縦可能なラジコン用モータドライバを自作しました。
この記事は<JLCPCB>様の提供で執筆しています。

操縦するロボットの紹介
テオヤンセン機構で駆動する6脚ロボットを自作しました。このロボットを無線操縦するためのモータドライバを作成しました。
実際の動きは動画でどうぞ!!
幾何学的な構造で動物みたいな動きをするテオヤンセンはとてもかわいい!
動画では、Futaba製ラジコン用モータドライバとラジコン用プロポで駆動させています。
このロボットの制御対象であるモーターはタミヤ380モータ×2個を搭載しています。
今回、1枚の制御基板で2系統のモーターをそれぞれ制御できるようにしていきます。
モータードライバの設計
では、さっそくモータードライバの構造を理解していきながら、基板の設計をしていきます。
モータードライバの基本的な考え方
モーターに単純に電気を流すとモーターは回転しますが、制御したとは言えません。
制御するためには正転方向、逆転方向の任意方向に動かすことが必要になってきます。
ということは、モーターに流す電流方向を切り替える回路を用意しなければいけません。
その回路こそが今から紹介するHブリッジ回路と呼ばれるものになります。(↓の図)
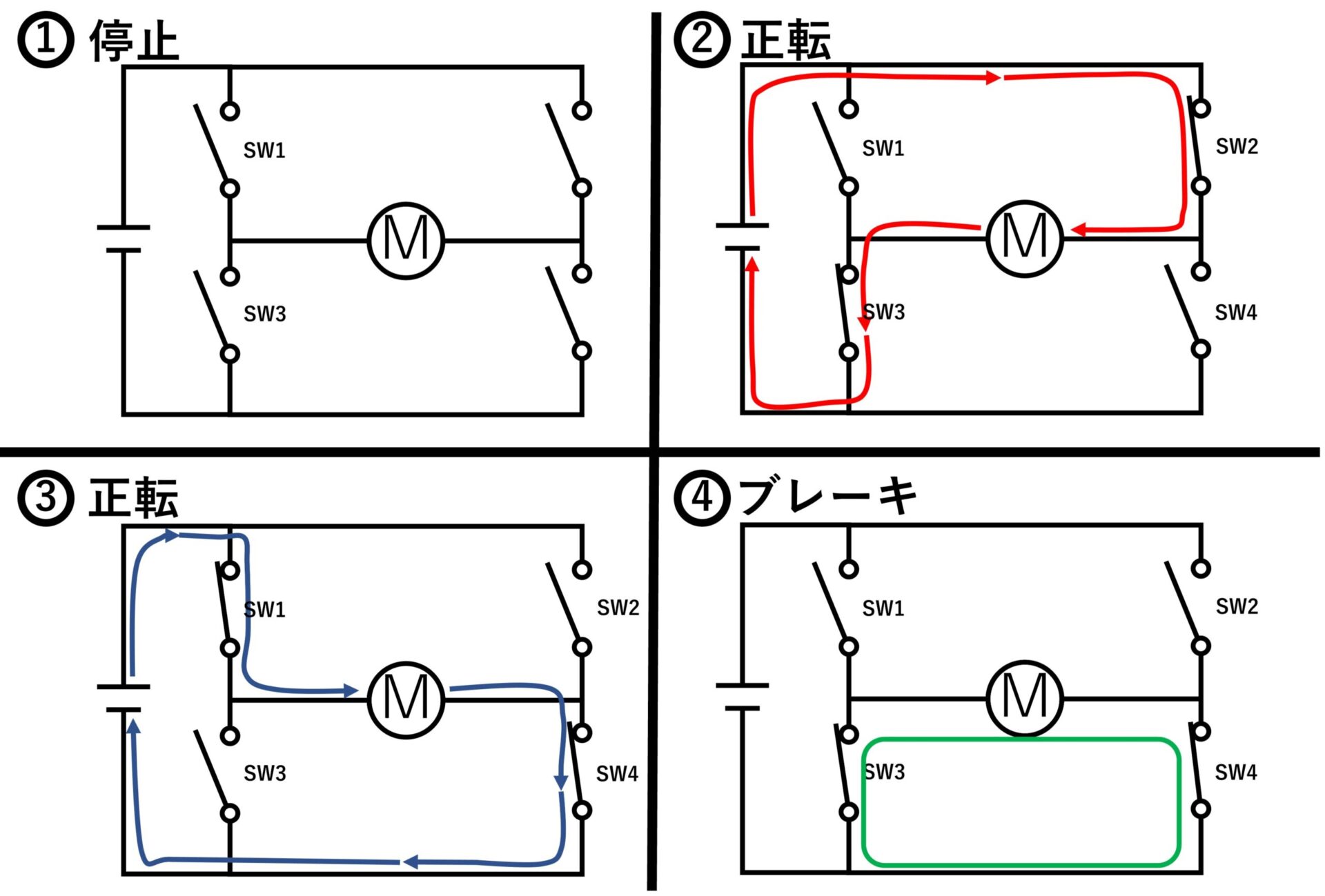
②番や③番のようにスイッチ入力を入れ替えることでモーターに入力する電流方向が変わります。
そんな理屈でモータの正転・逆転が切り替わります。
これらの動作をマイコン制御によって切り替えることができるような基板を設計していきます。
モータドライバ回路基板の設計の前に
モータードライバ基板はいろんな種類に分類することができます。
・PN混合モータドライバ
- Pch-FETとNch-FETを組み合わせて設計するモータドライバ回路
- Pch-FETはNch-FETと比較して性能が低いため、性能を上げようとすると値段が高くなりがち。
- けど、回路設計自体は簡単
・Full-Nchモータドライバ
- NchFETのみで構成されたモータドライバ回路
- 性能の高いNch-FETのみを使用して回路を構成できる
- FET間の性能を考慮する必要がない
- けど、ハイサイド側のFETに対して昇圧回路を組み込む必要があり、複雑な回路構成になってしまう
など、それぞれ利点、欠点などがありますが、今回は【Full-Nchモータドライバ】で作っていきたいと思います。
モータドライバ用回路図
今回使用した部品はこちらのようになっています。すべては紹介しきれないので主な部品を抜粋させていただきます。
| 型番 | 備考 | |
| MCU | ESP32 | 無線操縦をしたかったため |
| Nch-FET | 2SK2232 | 使い慣れてるものを選択 |
| HBドライバ | IR2104 | 秋月てお手軽に買えた |
一応電気特性とかは考えつつ、お手軽に入手できるもので部品選定をしていきました。
ほかの部品については以下の回路図を見ていただければと思います。
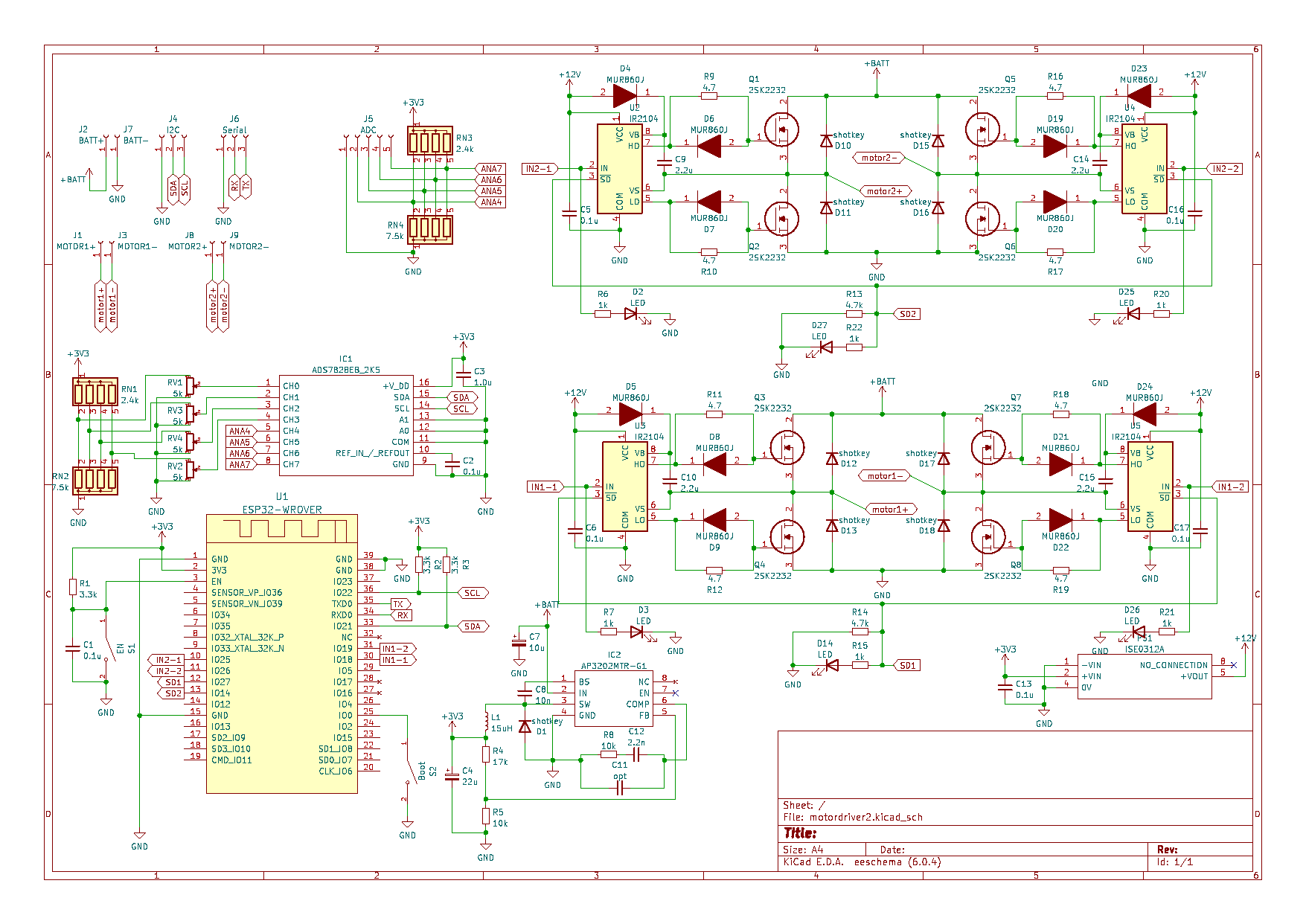
今回の基板に入れているAD変換用ICは今回実装しておりません。(買い忘れた。)
モータドライバの基板設計
設計した回路図をもとにKicadでプリント基板設計をしていきます。
今回はモータ駆動用の基板であるため、より多く電流が流れてもいいように以下のように基板の設計をしています。
そのため、モータ駆動用電流が流れるラインは2㎜の配線幅で設計。
また、基板の銅箔厚みもデフォルトでは1ozのところを2ozに変更。
これで理論値4Aまでの電流なら許容されるはず…
そんな感じで設計した配線図およびが3Dモデルが以下となります。
この設計データで相も変わらずJLCPCBさんに制作をお願いしました。
発注図面の作成、及び発注方法は過去の記事<【ESP32で電子工作-2】デジタル時計の作成(1)【プリント基板の作成】>見ていただければと思います。
基板の到着を楽しみに待って、早くロボットを動かしてみたいと思います。
実際に基板の作成、ロボットの駆動は次回の記事に書いています。
【ESP32で電子工作-7】ラジコン用Full-Nchモータードライバの作成(2)【ps4-esp32】
ぜひ、読んでいただければと思います。
今回は以上となります。
それでは、良き電子工作ライフを!!
See You …
