はじめに
1月も下旬に差し掛かり、慌ただしさが一段落したところで、予約していた 「電子工作ステーション」 の福袋(8,000円)を開封しました。
電子工作の福袋といえば、使い道に困る在庫処分品が詰め込まれているケースも少なくありません。しかし今回届いた箱の中身は、その予想を良い意味で裏切る内容でした。
「制御・入力・計測・出力」 のサイクルを一通り完結できる23点のパーツ構成は、即座にプロトタイピングを開始できる実用的なラインナップです。本記事では、技術仕様と市場価格の観点から、この福袋の価値を検証していきます。
パーツ構成の全体像:制御・計測・出力の完結性
箱から取り出したパーツを整理すると、単なる詰め合わせではなく、「マイコン制御→センサー計測→データ処理→視覚/音声出力」 という一連のフローを完結できる設計思想が見て取れます。
【詳細リスト】封入パーツの技術仕様
| カテゴリ | パーツ名 | 主要スペック/型番 |
|---|---|---|
| 制御基板 | Arduino UNO R3互換ボード | ATmega328P / USB Type-C |
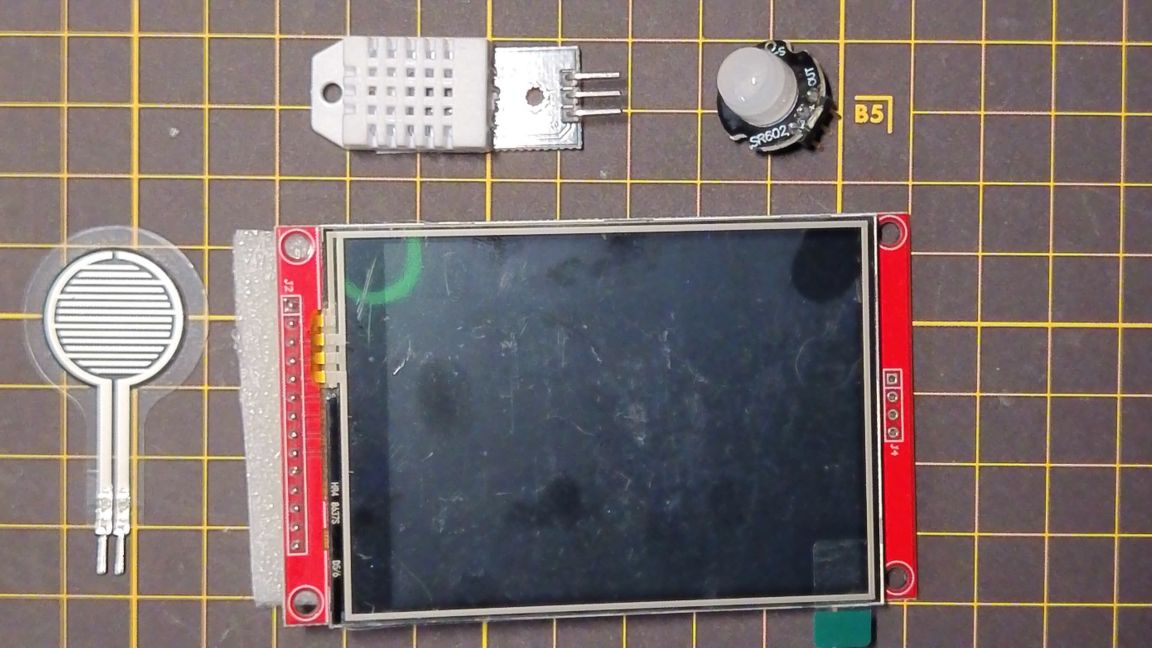
| ディスプレイ | 3.2インチTFT液晶 | ILI9341 / 240x320px / タッチ対応 |
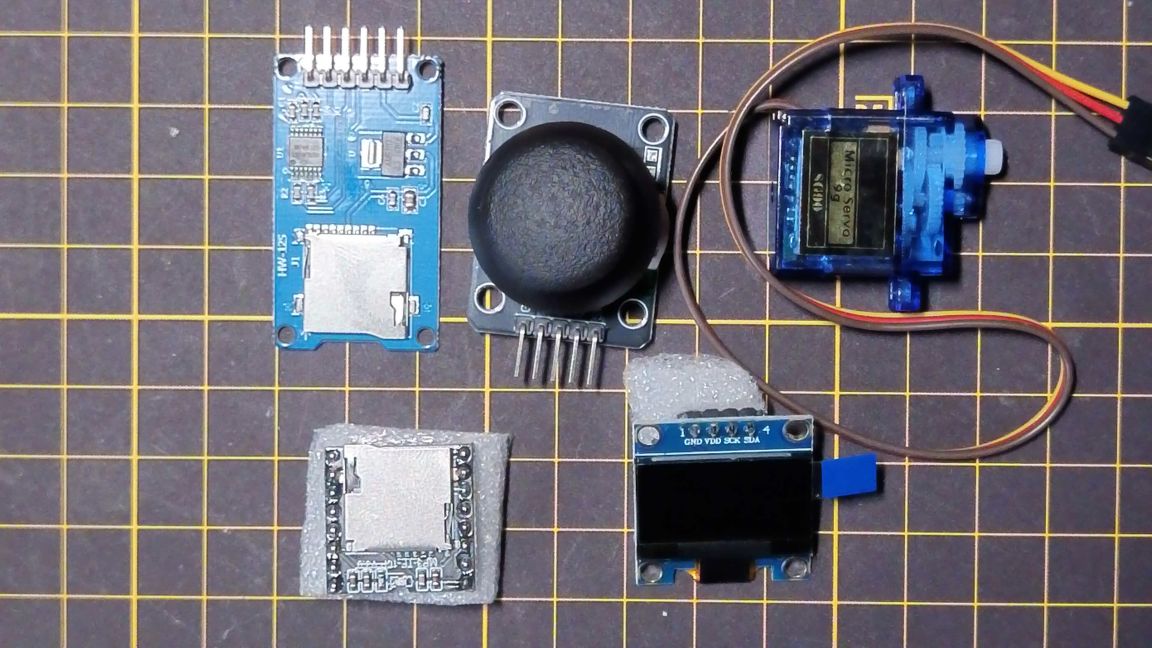
| 0.96インチOLED | SSD1306 / 128x64px / I2C | |
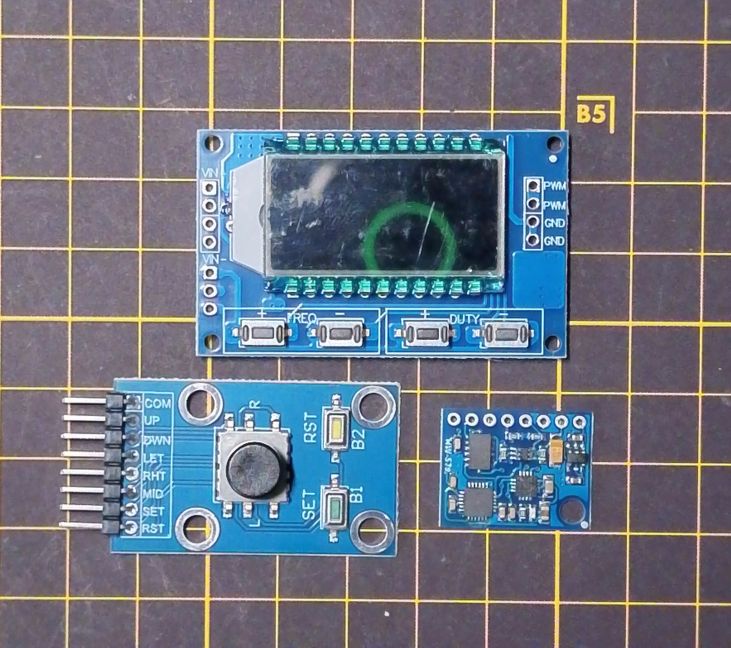
| 高度計測 | 9軸IMUセンサー | GY-85 (加速度+ジャイロ+磁気) |
| 電流センサー | INA219 (0-26V / ±3.2A) | |
| 薄膜圧力センサー | 抵抗式 / 測定範囲 50g〜100kg | |
| 環境センサー | 温湿度センサー | DHT22 (±2% RH / ±0.5℃) |
| 人感センサー | SR602 (焦電型赤外線 / 3m検知) | |
| 超音波距離計 | HY-SRF05 (2cm〜4.5m) | |
| 入力UI | 5方向ナビボタン | タクトスイッチ型 |
| ジョイスティック | 2軸アナログ + プッシュボタン | |
| タクトスイッチ | 2本足型 (複数個) | |
| 音・駆動 | DFPlayer mini | MP3再生モジュール / SD対応 |
| サーボモーター | SG-90 (180度 / トルク1.8kgf·cm) | |
| PWM信号発生器 | デューティ比可変型 | |
| その他 | 4桁7セグLED時計キット | TM1637ドライバIC |
| microSDシールド | SPI接続 / 5V/3.3V対応 | |
| マグネット式USBケーブル | 540度回転 / Type-C | |
| ブレッドボード + ジャンパー線 | 標準サイズ + 3種類のワイヤ | |
| 300円クーポン | 次回購入時利用可能 |
通常では自分で選ばないようなセンサー(9軸IMU、電流センサーなど)が含まれることで、技術的な引き出しを広げる機会を提供してくれる点が評価できます。
技術的注目パーツの深掘り
今回のラインナップの中で、特に実装時の自由度が高く、技術的な学習価値が高いと判断したパーツを詳細に解説します。
1. 3.2インチ TFT液晶モジュール(ILI9341 / SPI接続)
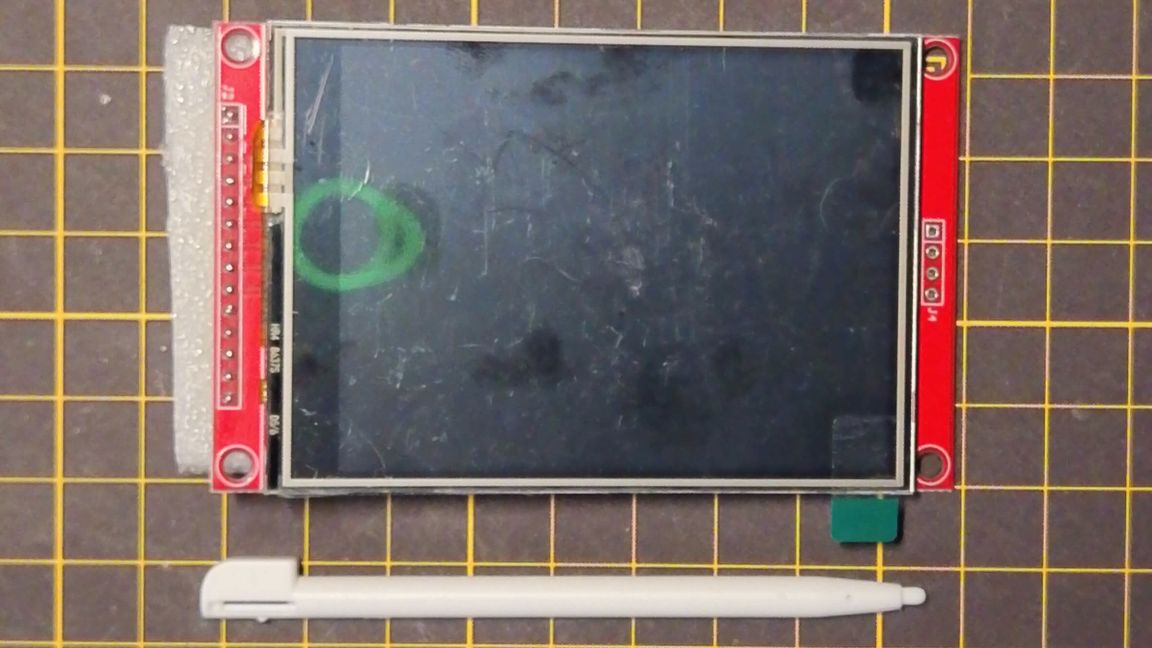
ILI9341コントローラ搭載 3.2インチTFT液晶(240x320px)
Arduino向けグラフィックライブラリのデファクトスタンダードであるILI9341を搭載した大型液晶です。
技術仕様:
- 解像度: 240 x 320 ピクセル(QVGA)
- 色深度: 16bit RGB565(約65,000色)
- インターフェース: SPI(最大クロック10MHz程度)
- タッチパネル: 抵抗膜方式(XPT2046コントローラ)
実装上の注意点:
- メモリ制約: Arduino Uno(SRAM 2KB)では全画面バッファ(240×320×2byte = 150KB)を確保できないため、部分描画(
setAddrWindow()で描画範囲を限定)が必須です。 - SPI速度: デフォルトのSPI設定(
SPISettings(8000000, MSBFIRST, SPI_MODE0))では描画が遅いため、クロックを10MHzまで引き上げることで体感速度が向上します。 - タッチ座標のキャリブレーション: タッチパネルの座標系と液晶の座標系は必ずしも一致しないため、4隅の校正処理が必要です。
活用例:
- 簡易オシロスコープ(ADC値をリアルタイムプロット)
- センサーダッシュボード(温湿度・圧力・加速度の同時表示)
- GUIを持つメニュー式デバイス(タッチ操作でモード切替)
2. 高精度薄膜圧力センサー(50g〜100kg / 抵抗式)

薄膜型圧力センサー(厚さ約0.3mm)
フレキシブルな薄型シート形状でありながら、最大100kgまでの荷重を検知できる抵抗式センサーです。
動作原理: センサー内部には圧力に応じて抵抗値が変化する感圧インク層が塗布されており、荷重がかかると導電パスが増加し、抵抗値が減少します。
測定回路の実装:
// 分圧回路による読み取り例
// VCC - [10kΩ固定抵抗] - [測定点A0] - [圧力センサー] - GND
int rawValue = analogRead(A0);
float voltage = rawValue * (5.0 / 1023.0);
// 抵抗値の算出(分圧の式)
float fixedResistor = 10000.0; // 10kΩ
float sensorResistance = fixedResistor * (5.0 / voltage - 1.0);
// ※キャリブレーションにより抵抗値→荷重(kg)の変換テーブルを作成
キャリブレーションの重要性: このセンサーは個体差が大きいため、既知の分銅(500g, 1kg, 5kgなど)を用いた実測キャリブレーションが不可欠です。実測データから近似曲線(対数関数や多項式)を求めることで、精度を向上させることができます。
活用例:
- スマート椅子(着席検知システム)
- 在庫管理IoT(棚の荷重監視)
- ペット用自動給餌器(残量検知)
3. 9軸IMUセンサーモジュール(GY-85 / I2C接続)
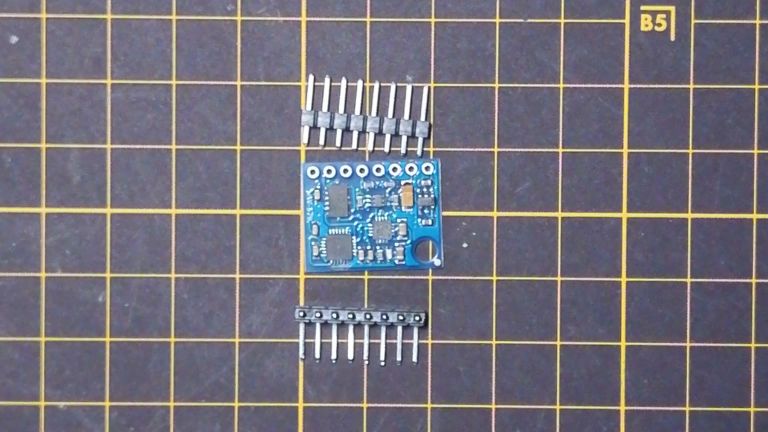
GY-85統合IMUモジュール(加速度・ジャイロ・地磁気センサー)
3種類のセンサーICが1枚の基板に統合された慣性計測装置(IMU: Inertial Measurement Unit) です。
搭載センサーの構成:
- 加速度センサー: ADXL345(3軸 / ±2g〜±16g可変レンジ)
- ジャイロセンサー: ITG-3205(3軸 / ±2000°/s)
- 地磁気センサー: HMC5883L(3軸 / ±8 gauss)
姿勢推定の技術的課題: 9軸センサーの真価は、3つのセンサーデータを統合して姿勢角(ロール・ピッチ・ヨー) を算出することにあります。しかし、各センサーには以下の特性があります:
- 加速度センサー: 重力方向は正確だが、動的加速度(振動)の影響を受けやすい
- ジャイロセンサー: 短期的な角速度は正確だが、積分によるドリフト(累積誤差)が発生
- 地磁気センサー: 方位は正確だが、金属や電流による磁気ノイズの影響を受ける
これらを補完するため、相補フィルタまたはカルマンフィルタによるセンサーフュージョンが必要です。
実装ライブラリ:
// Adafruit統一センサーライブラリを利用
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_ADXL345_U.h>
#include <Adafruit_ITG3200.h>
#include <Adafruit_HMC5883_U.h>
// 姿勢角算出には別途Madgwickフィルタ等の実装が必要
// Arduino UnoのSRAM制約を考慮し、浮動小数点演算を最小化
活用例:
- 倒立振子ロボット(PID制御による姿勢安定化)
- ドローンの姿勢制御
- VRヘッドトラッキング(頭部の向きをリアルタイム計測)
開発効率を向上させる周辺アクセサリの設計思想
今回の福袋で個人的に最も高く評価したのが、メインパーツを支える周辺アクセサリの実用性です。
Type-C対応Arduino Uno R3の意義
マグネット式着脱USBケーブル
Arduino Uno R3(Type-C)の接続

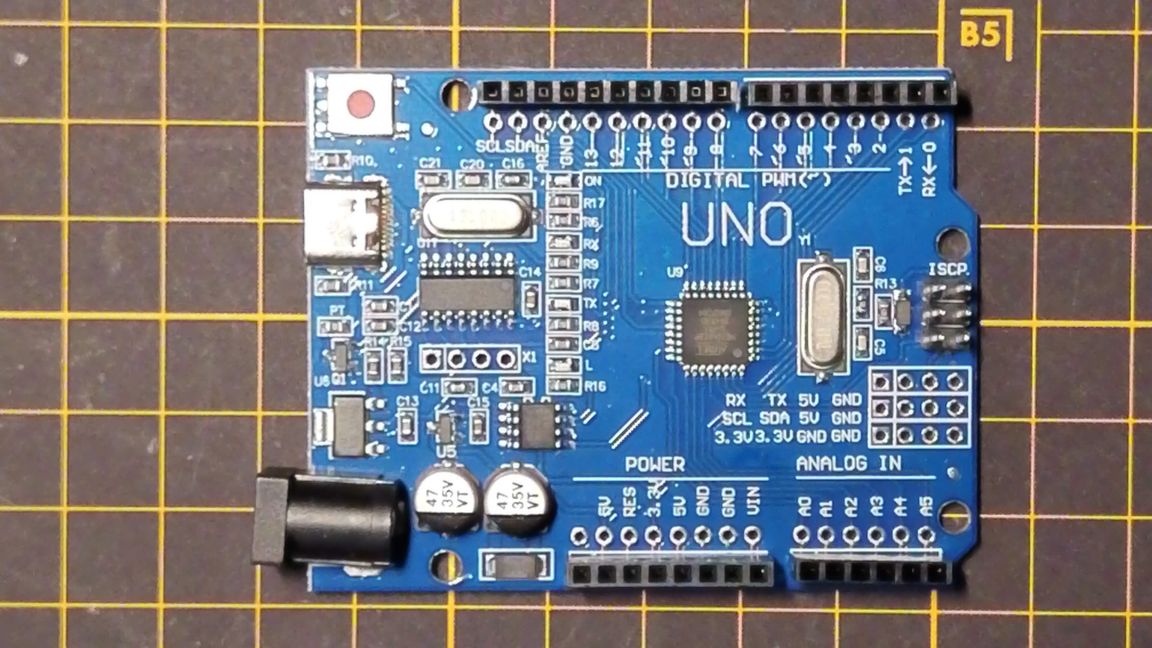
従来のArduino Uno R3はUSB Type-B端子を採用していましたが、本福袋に封入されていたのはType-C版の互換ボードです。
Type-C化による技術的メリット:
- コネクタの物理的耐久性: Type-Cは挿抜寿命が10,000回と、Type-B(5,000回)の2倍
- リバーシブル接続: 表裏を気にせず挿せるため、暗所や狭い場所での作業効率が向上
- ケーブルの共通化: スマートフォンやモダンなデバイスと統一されるため、デスク周りの配線が整理できる
マグネット式540度回転USBケーブルの実用性
さらに注目すべきは、マグネット着脱式のケーブルが同梱されていた点です。
技術的な保護効果:
- コネクタ摩耗の防止: 開発段階では書き込みとテストの繰り返しで、1日に数十回USBケーブルを抜き差しします。マグネット式にすることで、基板側のType-C端子への物理的負荷をゼロにできます。
- 不意の引っ張りに対する保護: ケーブルが引っかかった際、マグネットが外れることで、基板がデスクから落下する事故を防ぎます。
540度回転機構の利便性: ケーブルの根元が540度(1.5回転)回転するため、基板を回転させながら作業する際にケーブルがねじれません。特に複数のモジュールを配線しながら動作確認する際に、ストレスフリーな操作性を実現します。
構想中のプロジェクト:パーツ統合による実装例
封入されていたパーツを組み合わせることで、以下のような実用的なシステムを構築できます。今後、本ブログで実装過程を公開予定です。
プロジェクト1: リアルタイム環境モニタリングステーション
構想図:TFT液晶にセンサーデータをグラフ表示
使用パーツ:
- 3.2インチTFT液晶(ILI9341)
- DHT22温湿度センサー
- 薄膜圧力センサー(椅子の着席検知)
- SR602人感センサー
実装の技術ポイント:
- センサーデータの時系列グラフ化:
- TFT液晶に温度・湿度の推移を折れ線グラフで表示
- Arduino UnoのSRAM制約を考慮し、過去60点(1時間分)のデータのみをリングバッファで保持
- 着席時間の記録:
- 圧力センサーで「着席」を検知し、連続着席時間が90分を超えたら、液晶に警告メッセージを表示
- 長時間作業による健康リスクを視覚的にフィードバック
- 人感センサーによる省電力制御:
- 人が離席したことをSR602で検知し、TFT液晶のバックライトをPWM制御で減光
期待される応用: 在宅ワーク環境での「デスク環境の見える化」により、作業効率と健康管理を両立させるスマートオフィスガジェットとして機能します。
プロジェクト2: 物理操作型MP3プレイヤー
構想図:ジョイスティックで曲選択、サーボモーターがボリュームつまみに
使用パーツ:
- DFPlayer mini(MP3再生モジュール)
- ジョイスティック(2軸アナログ入力)
- microSDシールド
- SG-90サーボモーター
- 0.96インチOLED(曲名表示)
実装の技術ポイント:
- ジョイスティックによるナビゲーション:
- X軸:曲送り/曲戻し(ADC値の閾値判定でデジタル入力化)
- Y軸:再生/停止の切り替え
- プッシュボタン:シャッフル再生の有効/無効切り替え
- サーボモーターを利用した物理的ボリューム表示:
- DFPlayer miniの音量(0〜30の範囲)に連動してサーボの角度を変化させる
- 実際のポテンショメータ(可変抵抗)とは連動しないが、視覚的フィードバックとして機能
- OLED表示の最適化:
- ファイル名(
001.mp3など)をOLEDに表示 - 日本語対応のためには、フォントROMを外部SPIフラッシュに配置する必要があるが、今回は英数字のみに限定
- ファイル名(
期待される応用: スマートフォンに頼らない「デジタルデトックス」環境での音楽再生システムとして、物理的な操作感を重視したプレイヤーを構築できます。
プロジェクト3: 9軸IMUを用いた姿勢可視化デバイス
構想図:9軸センサーで計測した姿勢角を3D表示
使用パーツ:
- GY-85(9軸IMU)
- 3.2インチTFT液晶
- 5方向ナビゲーションボタン(キャリブレーション操作用)
実装の技術ポイント:
- Madgwickフィルタによる姿勢推定:
- 加速度・ジャイロ・地磁気の3センサーデータを統合し、クォータニオン(四元数)で姿勢を表現
- Arduino Unoの処理能力を考慮し、サンプリングレート50Hz程度で動作
- 3D立方体のワイヤーフレーム描画:
- TFT液晶上に、姿勢角に応じて回転する立方体をリアルタイム描画
- 3D→2D投影は透視投影(Perspective Projection)を使用
- 磁気キャリブレーション:
- 地磁気センサーは磁気ノイズの影響を受けやすいため、8の字キャリブレーションを実装
- オフセット補正とスケール補正のパラメータをEEPROMに保存
期待される応用: ドローンやロボットの姿勢制御アルゴリズムの検証ツールとして、センサーフュージョンの挙動をリアルタイムに可視化できます。
まとめ:福袋で獲得できる「技術的資産」の評価
今回の福袋を、単なる「部品の詰め合わせ」ではなく、技術学習のプラットフォームとして評価すると、以下の価値が浮かび上がります。
1. 技術領域の拡張性
この福袋の真価は、自分では購入しなかったであろうセンサーが手元に届くことにあります。
例えば:
- INA219電流センサー: バッテリー駆動デバイスの消費電力測定に応用可能
- GY-85(9軸IMU): 姿勢制御やカルマンフィルタなど、高度なアルゴリズムへの挑戦の機会
- 薄膜圧力センサー: IoT応用(スマート家具など)への新しい視点
これらが引き出しに入っていることで、新しいアイデアが浮かんだ際に 「試作のハードルを下げる」 効果があります。
2. 開発環境としての完結性
Arduino Uno R3(Type-C)を中核に、入力デバイス(ジョイスティック・ボタン)、出力デバイス(液晶・OLED・サーボ)、計測センサー(温湿度・圧力・9軸)、そして配線材(ブレッドボード・ジャンパー線)が揃っているため、箱を開けた瞬間からプロトタイピングを開始できるのは大きな強みです。
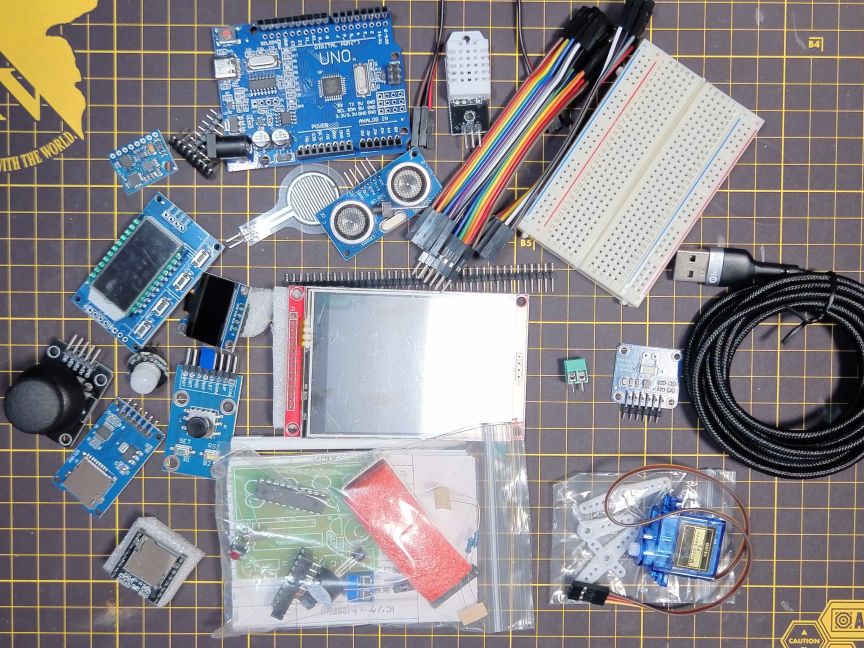
開封後のパーツ配置。これから様々なプロジェクトに組み込まれる予定です。
今後の展開:実装記事の予告
まずは以下のテーマで検証を進め、回路図とソースコードを含めた詳細記事を順次公開していきます:
- ILI9341液晶の高速描画テクニック - SPI設定の最適化とメモリ効率的な描画手法
- 9軸IMUによる姿勢推定実装 - Madgwickフィルタのゼロから実装
- 圧力センサーのキャリブレーション手法 - 既知荷重による実測と近似曲線の算出
電子工作における「実践的なノウハウ」を共有していきますので、ぜひ今後の記事もご期待ください。